Transrectal ultrasound (TRUS) is regularly used to guide prostate biopsies, which constitute the current gold standard for cancer diagnosis. Unfortunately, TRUS suffers from low sensitivity, leading to a high rate of false negative results. Therefore, MR images – and more recently also Ga-labelled PSMA (Prostate Specific Membrane Antigen) PET – are used to identify suspicious areas in the prostate. The challenge is now to fuse pre-interventional PET/MRI with interventional TRUS both accurately enough to allow targeting with the biopsy needle and fast enough not to impede clinical routine with too much (time-consuming) user interaction.
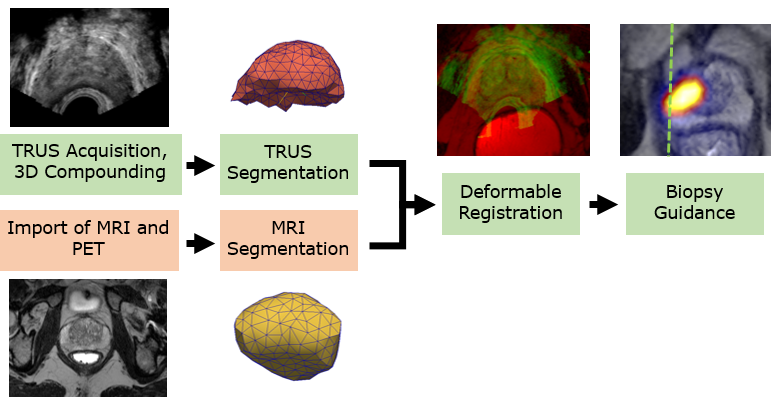
In this project, we proposed a novel method to first automatically segment the prostate in TRUS using a Hough transform based random forest approach. Then, a elastic surface registration is performed to fuse (PET/)MRI with TRUS, relying on the Coherent Point Drift algorithm. The minimal computation time for the entire pipeline (less than five minutes) allows implementation in the clinical routine.
For biopsy guidance, the prostate is segmented in both TRUS and MRI images, and their surfaces are registered for a fusion visualization.
Prostate image fusion, including registration and often segmentation, remains to be a very active topic in the research community. For details on our method as well as the impressive work of other groups around the world, please refer to our publications and the references therein:
@inproceedings{zettinig2017preconditioned,
title = {Preconditioned Intensity-Based Prostate Registration using Statistical Deformation Models},
author = {Oliver Zettinig and Julia Rackerseder and Beatrice Lentes and Tobias Maurer and Kay Westenfelder and Matthias Eiber and Benjamin Frisch and Nassir Navab},
url = {https://www.zettinig.eu/down/zettinig2017isbi.pdf},
doi = {10.1109/ISBI.2017.7950651},
year = {2017},
date = {2017-01-01},
booktitle = {2017 IEEE International Symposium on Biomedical Imaging (ISBI)},
pages = {853--857},
organization = {IEEE},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
@inproceedings{shah15hamlyn,
title = {Challenges in Multimodal Image-guided Targeted Prostate Biopsy},
author = {Amit Shah and Oliver Zettinig and Enno Storz and Tobias Maurer and Matthias Eiber and Nassir Navab and Benjamin Frisch},
url = {https://www.zettinig.eu/down/shah2015hamlyn.pdf},
year = {2015},
date = {2015-01-01},
booktitle = {Hamlyn Symposium on Medical Robotics, London, UK},
pages = {21--22},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
@article{zettinig2015multimodal,
title = {Multimodal image-guided prostate fusion biopsy based on automatic deformable registration},
author = {Oliver Zettinig and Amit Shah and Christoph Hennersperger and Matthias Eiber and Christine Kroll and Hubert Kübler and Tobias Maurer and Fausto Milletari and Julia Rackerseder and Christian Schulte zu Berge and Enno Storz and Benjamin Frisch and Nassir Navab},
url = {https://www.zettinig.eu/down/zettinig2015ipcai.pdf},
doi = {10.1007/s11548-015-1233-y},
year = {2015},
date = {2015-01-01},
journal = {International Journal of Computer Assisted Radiology and Surgery},
volume = {10},
number = {12},
pages = {1997--2007},
publisher = {Springer Berlin Heidelberg},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
@article{frisch2015pet,
title = {PET/MRI/TRUS image fusion guided prostate biopsy: development of a research platform and initial clinical results},
author = {Benjamin Frisch and Enno Storz and Oliver Zettinig and Amit Shah and Hubert Kübler and Nassir Navab and Hans-Jürgen Wester and Markus Schwaiger and Matthias Eiber and Tobias Maurer},
url = {http://jnm.snmjournals.org/content/56/supplement_3/510.abstract
http://campar.in.tum.de/pub/frisch2015SNM1/frisch2015SNM1.pdf},
year = {2015},
date = {2015-01-01},
journal = {Journal of Nuclear Medicine},
volume = {56},
number = {supplement 3},
pages = {510},
publisher = {Society of Nuclear Medicine},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
@article{storz2015psma,
title = {PSMA-PET/MRI-guided transrectal fusion biopsy for the detection of prostate cancer},
author = {Enno Storz and Amit Shah and Oliver Zettinig and Matthias Eiber and Hans-Jürgen Wester and Hubert Kübler and Jürgen E. Gschwend and Markus Schwaiger and Benjamin Frisch and Tobias Maurer},
url = {https://www.zettinig.eu/down/storz2015eau.pdf},
doi = {10.1016/S1569-9056(15)60217-2},
year = {2015},
date = {2015-01-01},
journal = {European Urology Supplements},
volume = {2},
number = {14},
pages = {e217},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
@inproceedings{shah2014open,
title = {An open source multimodal image-guided prostate biopsy framework},
author = {Amit Shah and Oliver Zettinig and Tobias Maurer and Cristina Precup and Christian Schulte zu Berge and Jakob Weiss and Benjamin Frisch and Nassir Navab},
url = {https://www.zettinig.eu/down/shah2014miccai_clip.pdf},
doi = {10.1007/978-3-319-13909-8_1},
year = {2014},
date = {2014-01-01},
booktitle = {Clinical Image-Based Procedures. Translational Research in Medical Imaging},
volume = {8680},
pages = {1--8},
publisher = {Springer LNCS},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}